Description
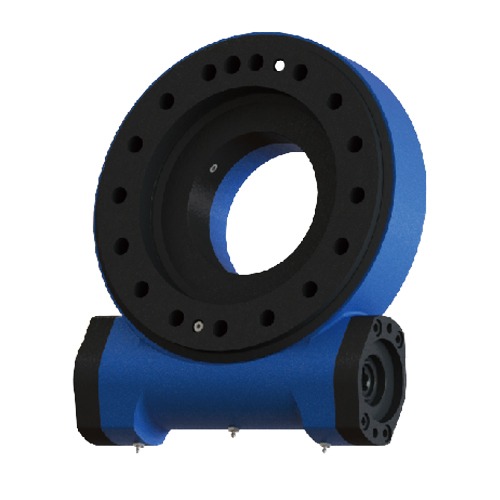
Der konstruktive Aufbau des SE-Schwenkantriebs umfasst in der Regel die folgenden Hauptkomponenten:
- Äußerer Ring und innerer Ring: Der Grundaufbau des SE-Schwenkgetriebes besteht aus einem äußeren großen Ring und einem inneren kleinen Ring. Zwischen diesen beiden Ringen wird ein ringförmiger Raum gebildet, in dem die Drehbewegung stattfindet. Der äußere Ring ist in der Mechanik befestigt, während der innere Ring mit der Mechanik verbunden ist und sich durch das Antriebssystem dreht.
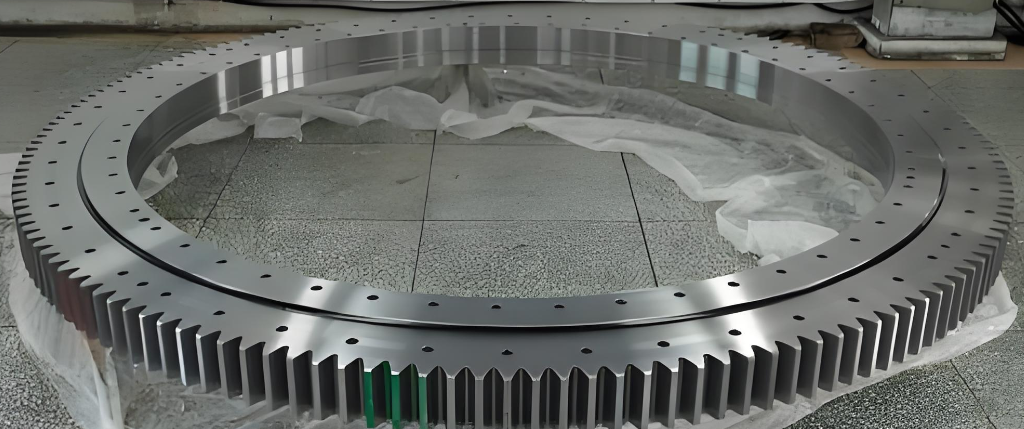
- Zahnradsystem: Das Zahnradsystem zwischen dem Innen- und dem Außenring ist der wichtigste Übertragungsmechanismus. Das Getriebesystem besteht aus präzisionsgefertigten Zahnrädern, die eine reibungslose Drehung des Innenrings gegenüber dem Außenring ermöglichen. Die Konstruktion und Herstellung von Zahnrädern ist entscheidend für die Genauigkeit, Drehmomentübertragung und Haltbarkeit des Systems.
- Motor: Der Motor ist die Energiequelle des Schwenkantriebs der SE-Serie, und in der Regel wird ein hocheffizienter Gleich- oder Wechselstrommotor gewählt. Die Abtriebswelle des Motors ist mit dem Getriebesystem verbunden, um die Drehbewegung durch Bereitstellung eines Drehmoments anzutreiben.
- Untersetzungsgetriebe: Um die vom Motor abgegebene Hochgeschwindigkeits-Drehbewegung zu reduzieren, sind die Schwenkantriebe der Serie SE in der Regel mit einem Untersetzungsgetriebe ausgestattet. Untersetzungsgetriebe erhöhen das Drehmoment durch Verlangsamung der Drehbewegung und sorgen für eine gleichmäßige und präzise Funktion des Systems.
| Model | Output Torque | Tilting Moment Torque | Holding Torque | Gear Ratio | Tracking Precision | Weight | Drawing |
|---|---|---|---|---|---|---|---|
| SE9 | 6.5 KN.m | 33.9 KN.m | 38.7 KN.m | 61:1 | 0.17° | 49kg | |
| SE9 | 4794 lbf.ft | 25×10³ lbf.ft | 29×10³ lbf.ft | 61:1 | 0.17° | 49kg |





Reviews
There are no reviews yet.